Autonomous Sailboat
At A Glance
- Designed systems architecture for a fully autonomous 2 m sailboat.
- Built a rigid wingsail with integrated wind sensing and self-trimming control.
- Developed CFD-optimized hull for speed, stability, and internal systems space.
- Optimized actuator control for improving responsiveness and sailing performance.
- Implemented CAN-bus network linking onboard computer, sensors, and controllers.
- Received WPI Povost Award for best senior capstone project in Robotics Engineering.
- Recieved first place finish at the 2018 International Robotic Sailing Regatta

_______________________________________________________________
SailBot
The goal of the International Robotic Sailing Regatta is to design a 2m long boat that can autonomously race through a 1-mile long course as well as perform a variety of other navigational tasks.
This was a continuation of a previous years project that had done fairly well in the competition. However, In our first project meeting, my 3 teammates and I decided on the lofty goal that we would be designing and building:
| - new hull - new steering system - re-designed navigation system - new movable ballast - new rigid wingsail - new composite cloth sail - new vision-based obstacle avoidance system - re-designed optimal path trajectory planning |
HOW IT WORKS:
Disclaimer: The purpose of this article isn’t to get too far into the nitty-gritty of how this thing actually functions. However, If you are interested, you can find much more technical detail HERE in our complete report of the project.
The Hull:
The geometry of the hull was designed with packaging, ballast, and sailing dynamics in mind. The bow and stern profiles of the hull were derived from modern, high-performance yachts such as the Imoca 60 and the Volvo 65. These boat designs have proven to be light, stable, efficient, and seaworthy in all sailing conditions.

While speed and seaworthiness were important we mostly needed to make sure this hull would be able to house all of the hardware, sensors, and cabling we would need to control it.
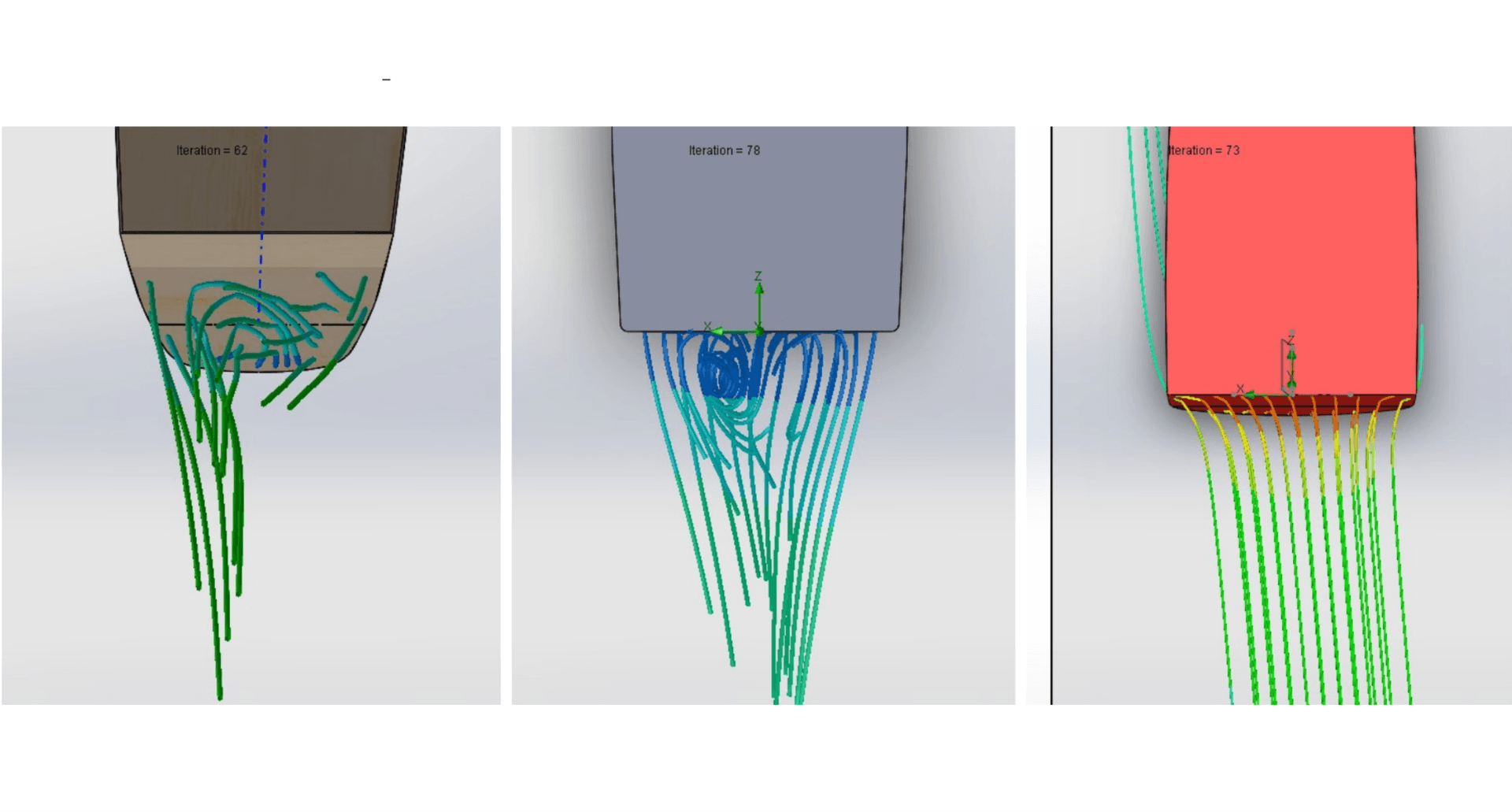
So we ran several CFD simulations to optimize the shape and ensure it would pass throught he water without creating inwanted vorteces.
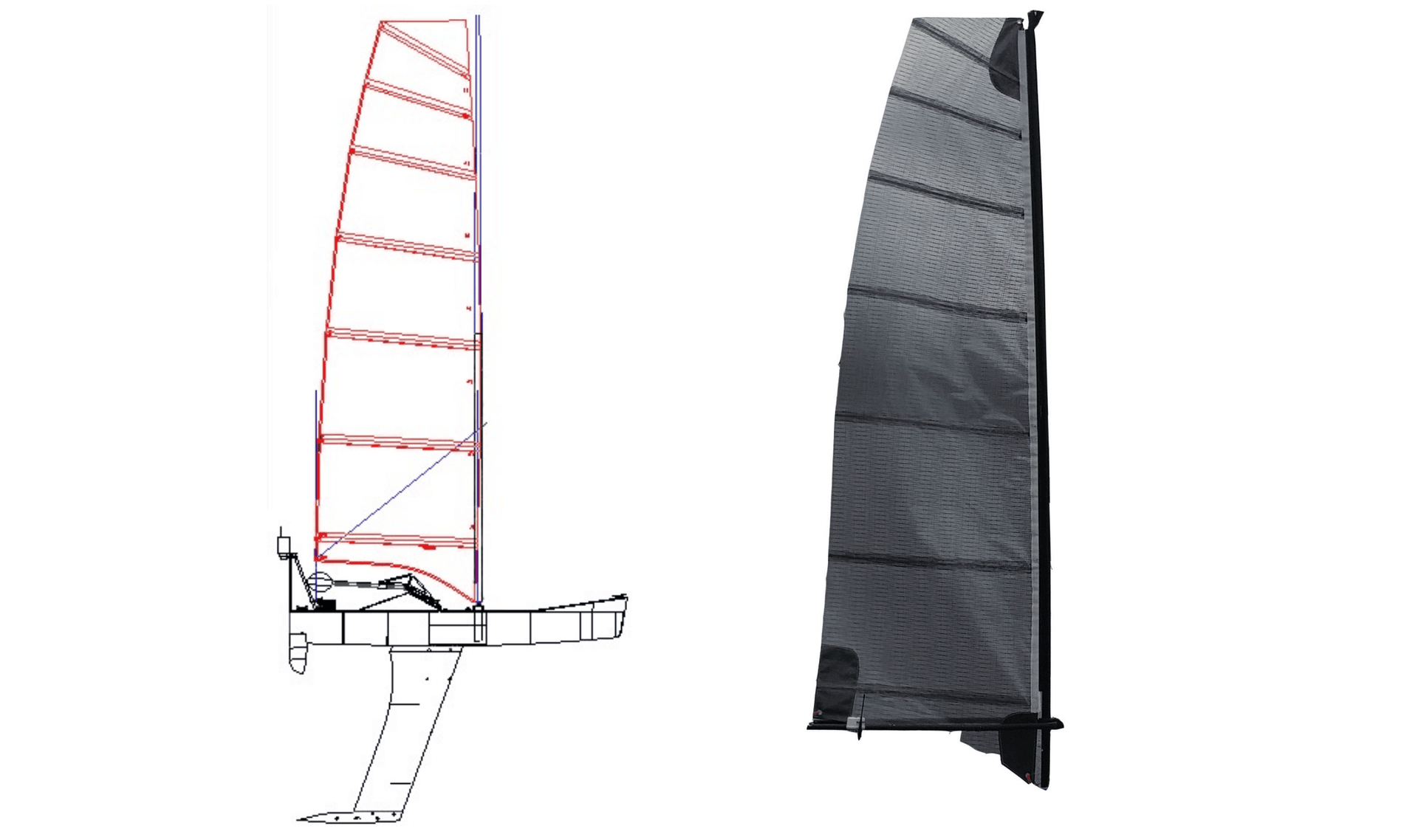
The Wingsail:
We decided that if we were going to build a high-tech boat, we might as well also build the most advanced sail possible as well. We decided to make a wingsail that was completely self-contained, self-trimming, and wirelessly connected to the boat.

With such a complex wingsail comes lots of risk, and we would need a backup sail. However, if we were going to make a backup sail, we might as well make the best backup sail imaginable. So, with the help of Chris Williams, an engineer at Quantum Sails, and Taylor North, from Dimension Polyant, we constructed another badass sail constructed from aramid impregnated composite sailcloth.
The Cloth Sail:
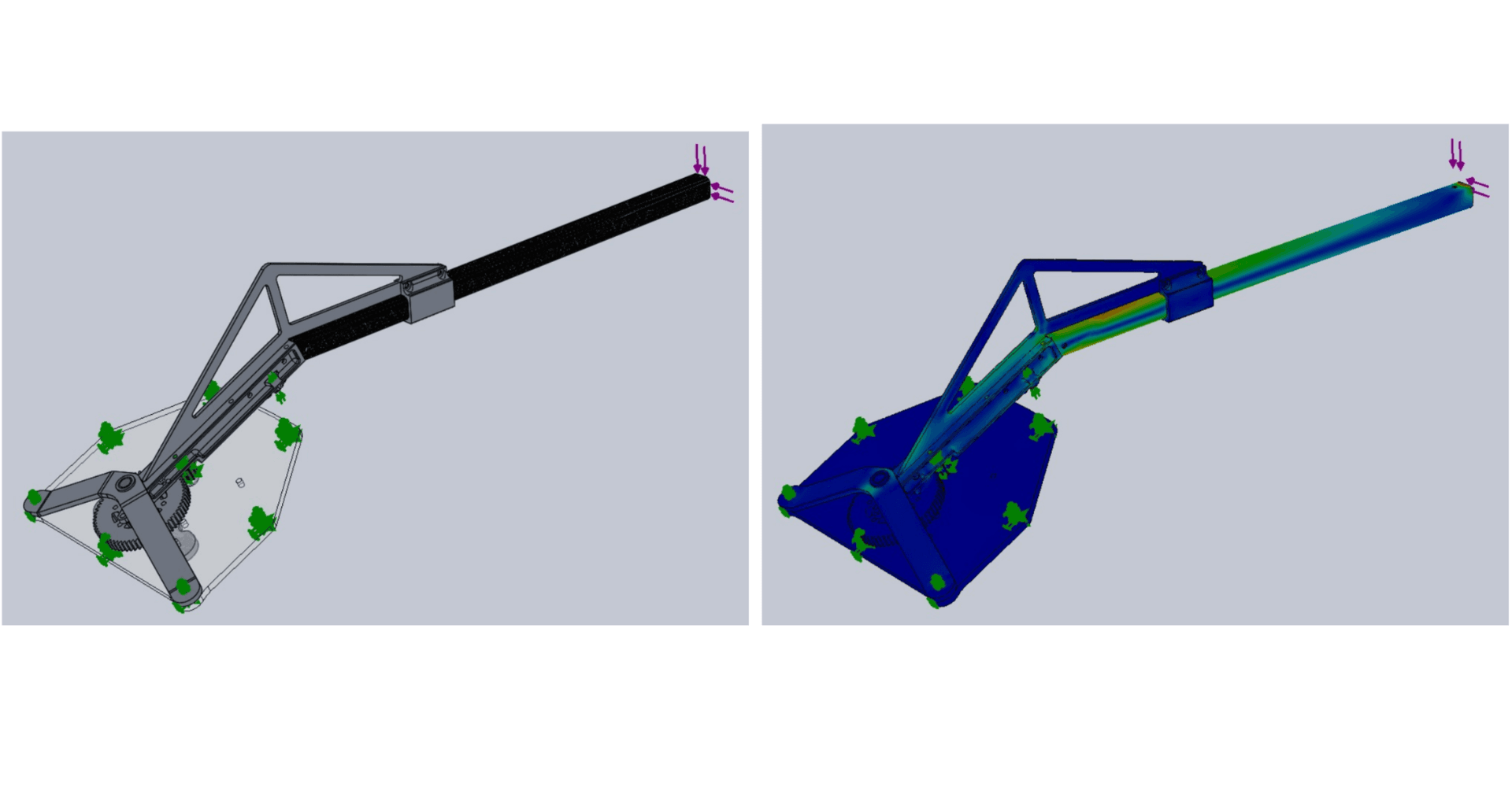
Now, what's a sailboat without your rail meat crew running from side to side of the boat. We'll, our solution to this was a mechanical arm that would swing a lead ball back and forth to always keep the boat at exactly 10 degrees of leeward heel.
Now, it need not be said that the electronics and control architecture of this boat could fill a book of it's own, here is an overview of a bit of the inner workings of the control and navigation.
Control Overview:
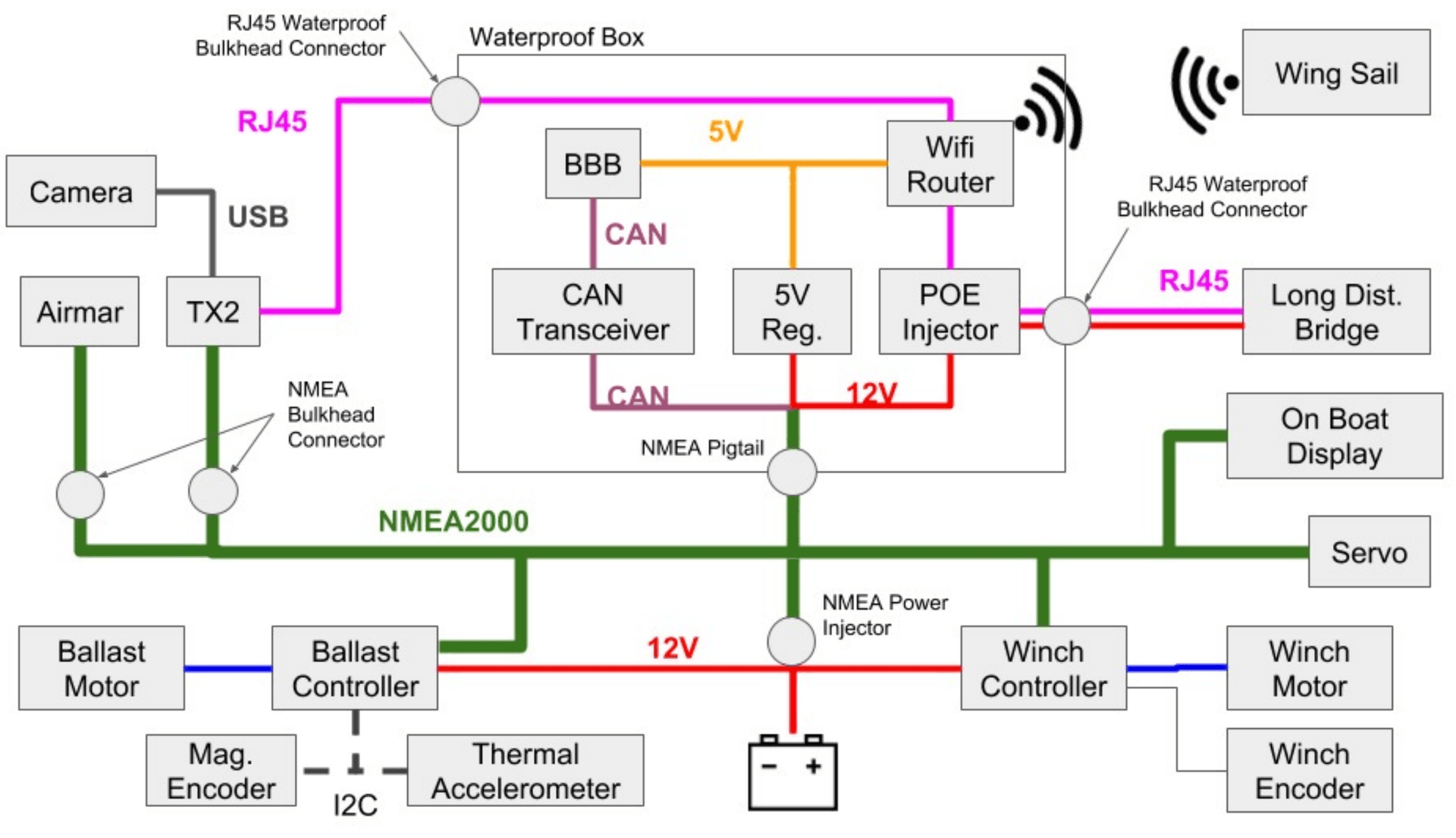
Essentially, there are many different sensors and motors mounted to the boat acting as a node on our CAN bus. The computer we used to manage all these nodes was a BeagleBone Black.
The beaglebone runs multiple processes which communicate using a publish/subscribe architecture which shares messages between individual processes, or nodes. The Primary Control Node controls the path planning and overall decision making of the robot. The State Estimator Node provides the wind, heading, and position data, which is used to produce motor control outputs. The CAN
Node communicates these outputs to the motor controllers on the CAN bus. Additional nodes are used for logging and debugging via a web interface.
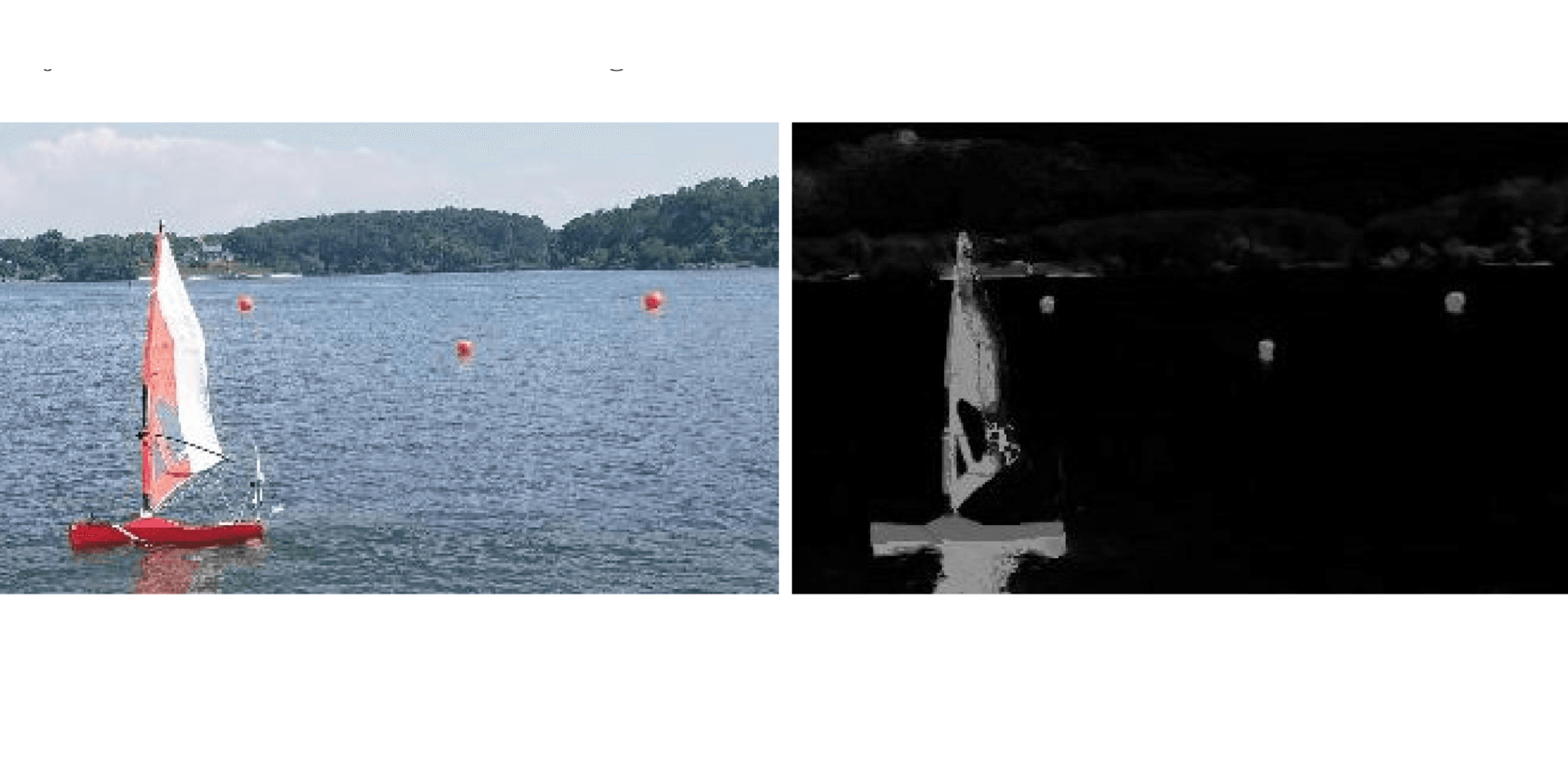
Navigation:
A really cool part of the boat is the way it actually new how to perform these tasks automatically. In essence, the boat could be wirelessly connected to our laptop where GPS waypoints could be assigned to it. The boat would then use it's onboard wind sensor data to calculate an optimal sailing angle and sail trim to tack, gybe, and navigate to those positions. Then, when the boat came within a close enough proximity to the point (buoys in this case, it used computer vision to identify the marks. This "rounding procedure" helped the boat to round a mark closely but without hitting it. It also allowed the boat to sail far enough to layline instead of getting stuck directly downwind of a windward mark for example.
In the end, not only did we create a well-equipped high-performance boat, but all of our work led us receiving the WPI Provost award for best robotics capstone projecte. Whe then continued on to win first place in the 2018 International Robotic Sailing Regatta. I learned a lot from this project and took away a new appreciation for the difficulties and applications of autonomous, on water navigation.
Read More About this Project:
SailBot Combines Robotics and Sailing Challenges
